PID контролер: описание, състав, настройка
Много често за системни процеси е необходимо контролиран параметър (например температура или скорост на въртене) да може незабавно да реагира на външни влияния и в същото време да поддържа други стойности на константи на системата, като налягане, дебит и т.н. система, която съдържа няколко клапана за дренаж. За да се поддържа постоянен равномерен поток на всеки клапан, налягането в тръбопровода трябва да е постоянно. ако система помпа задвижван от задвижването, тогава в случая 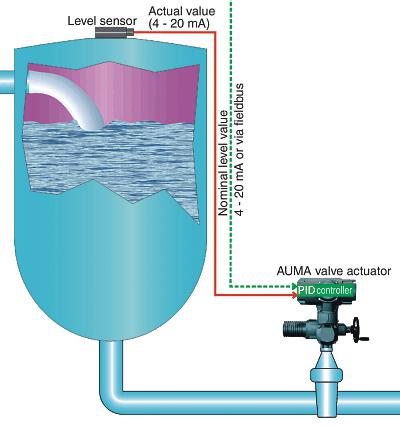 при отваряне на един или повече клапани, скоростта на двигателя трябва да се увеличи, а при затваряне - по-ниска. По този начин ще се поддържа постоянно налягане в системата. За да се гарантира такава работа, е необходим PID контролер. Налягането в системата се измерва от сензора и се сравнява с зададената стойност. Според резултатите от сравнението, PID контролерът контролира скоростта на двигателя. В тази статия ще разгледаме какво представлява такова устройство.
при отваряне на един или повече клапани, скоростта на двигателя трябва да се увеличи, а при затваряне - по-ниска. По този начин ще се поддържа постоянно налягане в системата. За да се гарантира такава работа, е необходим PID контролер. Налягането в системата се измерва от сензора и се сравнява с зададената стойност. Според резултатите от сравнението, PID контролерът контролира скоростта на двигателя. В тази статия ще разгледаме какво представлява такова устройство.
От какво се състои PID контролерът?
За да се елиминират грешките в системата, гореспоменатото устройство се състои от три компонента: интегрални, диференциални и пропорционални контролери. Пропорционалното устройство е основно, когато заданието за скорост е пропорционално на грешката. Ако обаче се използва само този компонент, в системата винаги ще има грешка. Високите стойности на това устройство водят до колебания и нестабилност на системата, а ниските стойности - до "летаргия". За отстраняване на грешки се използва интегрално устройство. Скоростта се увеличава до момента на отстраняване на грешката (с отрицателна грешка - намалява). Относително малки стойности на интегралния компонент оказват значително въздействие върху работата на устройството като цяло. Ако настройката е твърде висока, системата ще започне да работи с превишаване. Диференциалното устройство оценява скоростта на промяна на грешките, използва се за увеличаване на скоростта на системата. Въпреки това, с увеличаване на скоростта на контролера, нивото на превишаване се увеличава, което може да доведе до нестабилност на системата. Най-често този компонент е настроен на стойност, близка до нула, но може да бъде много полезна в системата за позициониране. PID контролерът получи името си след първите букви на тези три компонента. Както може да се види от описанието на устройството, важно изискване за правилното функциониране на устройството е неговото отстраняване на грешки. 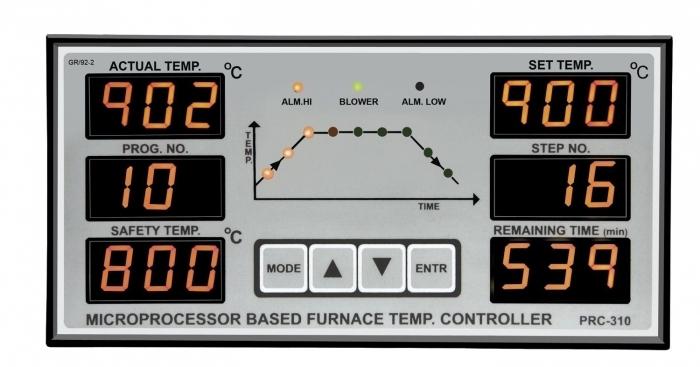
PID контролна настройка
За всяка система настройката на устройството се извършва индивидуално, тук разглеждаме основните препоръки, които са общи за различни ситуации:
1. Поставете диференциалните и интегралните компоненти на нула. Настройте максималната скорост и наблюдавайте реакцията.
2. Увеличете пропорционалния компонент и повторете първия параграф. Продължете тази процедура, докато започне процесът на автоколебание.
3. Намалете този компонент до стабилността на системата.
4. Задайте стойността на пропорционалния компонент на 15% под устойчивия.
5. Настройте стъпаловидната максимална скорост, като промените интегралния компонент.
6. Обикновено диференциалният контролер не трябва да се настройва.
7. Проверете стабилността на системата. 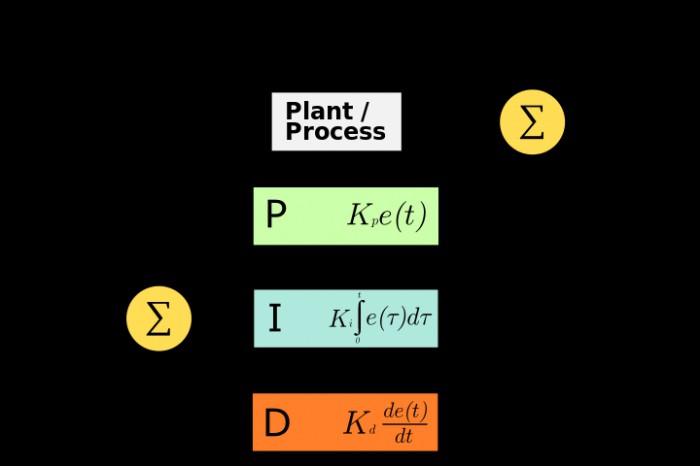
заключение
Използването на такива устройства в технологията е много широко, те се използват в почти всяка сфера на човешката дейност. Така например Температурен PID регулатор присъства в електрическата кана или в персоналния компютър (в компютъра е необходимо да се регулира скоростта на въртене на вентилаторите, докато се увеличава CPU температура).